Видео с ютуба Control Barrier Functions

Reactive Robot Navigation Using Quasi-conformal Mappings and Control Barrier Functions

Chuchu Fan - Graph Control barrier Function for Large-Scale Multi-Agent Safe Control

Webinar Teaser - Safe Reinforcement Learning (SRL) Using Control Barrier Functions

Neural Control Barrier Functions for Safe Navigation

Using Control Barrier Function (CBF) to Incorporate Observability

CBF-MPC | Control Barrier Functions | Model Predictive Control | Drone
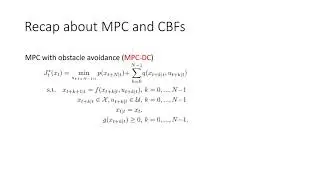
Jun Zeng - Safety-Critical Model Predictive Control with Discrete-Time Control Barrier Function

Viability Kernel from Extended Control Barrier Function using Hamilton-Jacobi Reachability.

ACC24: Practical Considerations for Implementing CBF Safety Filters (Presentation)

Learning a Better Control Barrier Function

Passivity-Based Control of Delayed Multi-Robot Systems Using Control Barrier Functions

CoRL 2020, Spotlight Talk 293: Learning Hybrid Control Barrier Functions from Data

Control Barrier Functions via Minkowski Operations for Safe Navigation among Polytopic Sets

Polygonal Cone Control Barrier Functions (PolyC2BF) for safe navigation in cluttered environments

Safe Human-Robot Collaboration with Multiple Backup Control Barrier Functions and Learning
Intersection with Predictive Control Barrier Function

Safe Multi-agent Satellite Servicing With Control Barrier Functions, Full Talk

UAV Obstacle Avoidance with Control Barrier Functions

Lec 40 Control Barrier Function (CBF)
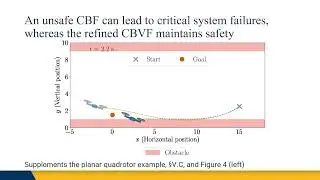
Refining Control Barrier Functions through Hamilton-Jacobi Reachability - IROS Supplementary video

Distributed Perception Aware Safe Leader Follower System via Control Barrier Methods (ICRA 2025)

Probabilistic Safe Online Learning with Control Barrier Functions - Kinematic Vehicle Demonstration

Zeroing Control Barrier Functions for Safe Volitional Pedaling in a Motorized Cycle

Distributed Control Barrier Functions for Global Connectivity Maintenance

Multi-Agent Obstacle Avoidance using Velocity Obstacles and Control Barrier Functions (ICRA 2025)